Stokta Yok


Stokta Yok
Stoklara düşünce haber ver
Kampanya
- Ürün Özellikleri
- Yorumlar (0)
- Teslimat Koşulları
- Tavsiye Et
-
TB6612FNG Çift Motor Sürücü Kartı - Yeni Versiyon
Son yılların en popüler motor sürücü devresi. Çok küçük ve ekonomik.
Bir çok mini sumo robot ve çizgi izleyen robotlara kullanımı uygundur
Mini sumo robot, çizgi izleyen robot gibi düşük akım çeken robot projeleri için uygun motor sürücü devresidir. KullanılanToshiba TB6612FNG entegresi, piyasada bulunan birçok motor kontrol entegresinden daha üstün özelliklere sahiptir.
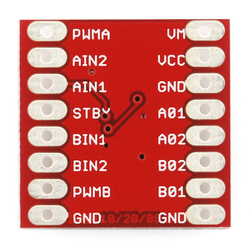
TB6612FNG Sürücü Özellikleri
- Voltaj Aralığı (VMOT): 4.5 ? 13.5 V
- Çıkış Akımı: Her bir kanal için Anlık 3A, devamlı 1 A
- Maksimum PWM frekansı: 100 kHz
- İki Kanal Bağımsız Kontrol Edilebilir.
- Dahili sıcaklık koruması
- Elektriksel gürültü filtreleme kondansatörleri
- Ters polarize koruması
- Ardiuno QTR ve TB6612 ile PİD örneği.
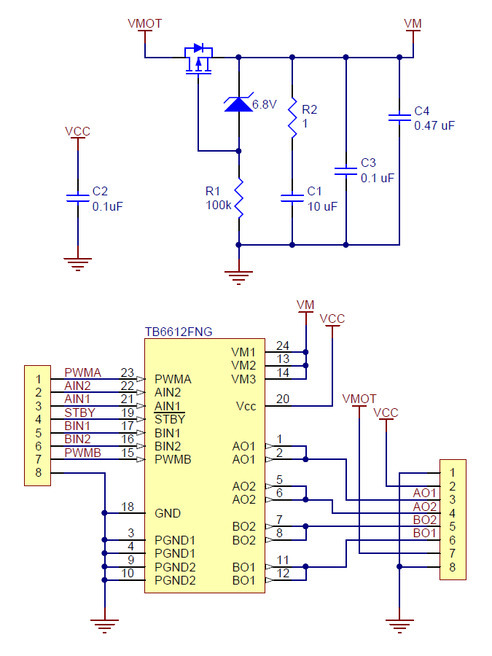
- Entegre Pdf dökümanı için tıklayınız.
 TB6612FNG Çift Motor Sürücü Kartı Arduino Kodu//motor A connected between A01 and A02
TB6612FNG Çift Motor Sürücü Kartı Arduino Kodu//motor A connected between A01 and A02
//motor B connected between B01 and B02
int STBY = 10; //standby
//Motor A
int PWMA = 3; //Speed control
int AIN1 = 9; //Direction
int AIN2 = 8; //Direction
//Motor B
int PWMB = 5; //Speed control
int BIN1 = 11; //Direction
int BIN2 = 12; //Direction
void setup(){
pinMode(STBY, OUTPUT);
pinMode(PWMA, OUTPUT);
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
pinMode(PWMB, OUTPUT);
pinMode(BIN1, OUTPUT);
pinMode(BIN2, OUTPUT);
}
void loop(){
move(1, 255, 1); //motor 1, full speed, left
move(2, 255, 1); //motor 2, full speed, left
delay(1000); //go for 1 second
stop(); //stop
delay(250); //hold for 250ms until move again
move(1, 128, 0); //motor 1, half speed, right
move(2, 128, 0); //motor 2, half speed, right
delay(1000);
stop();
delay(250);
}
void move(int motor, int speed, int direction){
//Move specific motor at speed and direction
//motor: 0 for B 1 for A
//speed: 0 is off, and 255 is full speed
//direction: 0 clockwise, 1 counter-clockwise
digitalWrite(STBY, HIGH); //disable standby
boolean inPin1 = LOW;
boolean inPin2 = HIGH;
if(direction == 1){
inPin1 = HIGH;
inPin2 = LOW;
}
if(motor == 1){
digitalWrite(AIN1, inPin1);
digitalWrite(AIN2, inPin2);
analogWrite(PWMA, speed);
}else{
digitalWrite(BIN1, inPin1);
digitalWrite(BIN2, inPin2);
analogWrite(PWMB, speed);
}
}
void stop(){
//enable standby
digitalWrite(STBY, LOW);
}Ürün EtiketleriTB6612FNG motor sürücü , çift motor sürücü kartı , raspberry pi motor sürücü , robotik motor sürücü , dc motor sürücü kartı , stepper motor sürücü , elektronik proje motoru , pwm motor kontrol , 1.2A motor sürücü , motor kontrol modülü , motor sürücü devresi , motor sürücü kartı , motor sürücü fiyatları , tb6612fng çift motor sürücü , mosfet motor sürücü , mosfet motor sürücü devresi , çift kanallı motor driver
Benzer Ürünler


914,30 TL
+ KDV

92,08 TL
+ KDV

1.031,58 TL
+ KDV

609,84 TL
+ KDV

16,50 TL
+ KDV
")
328,38 TL
+ KDV

993,41
TL
413,92 TL
+ KDV