
Arduino ile Hızlı Çizgi İzleyen Robot Yapımı
"Arduino ile hızlı çizgi izleyen robot yapımı" konulu yazımızda meb robot yarışması uyumlu olan bir hızlı çizgi izleyen robot toplayacağız. Oluşturacağımız bu robot kiti ile rakiplerinizle yarışabilir, ve yarışmalarda derece elde edebilirsiniz. Ülkemizde çeşitli bölgelerde robot yarışmaları düzenlenmektedir. Ve hızlı çizgi izleyen robot kategorisi en popüler robot yarışma kategorilerinden biridir. Hal böyle olunca katılımı yüksek ve yarışma anları çekişme dolu geçmektedir. Sizde bu yazımızı referans alarak robotunuzu toplayabilir ve bu çekişmeli anlara dahil olabilirsiniz.
Hızlı Çizgi İzleyen Robotlar Nasıl Çalışır?
Hızlı Çizgi izleyen robotlar ulaştıkları yüksek hızlar sebebiyle düz çizgi olan bir parkurda yarıştırılmaktadır. Bu yarışmalar drag race olarak ta adlandırılmaktadır. Amaç diğer çizgi izleyen robot yarışmalarında olduğu gibi parkuru en kısa sürede tamamlamaktır. Hızlı çizgi izleyen robotların üzerinde parkurda bulunan start kapısını algılaması için bir adet cisim algılayıcı sensör bulunmalıdır. Robot bu sayede kapı açıldığında yarışa başlayabilir. Robotun hızlı bir şekilde ivme kazanması ve bu ivmeyi koruması için ağırlığı çok önemlidir. Tavsiye ettiğimiz toplam robot ağırlığı 200 gram ile 300 gram arasıdır.
Hızlı çizgi izleyen robotlarda kullanılan motorların gücünü tam olarak kullanabilmek adına özel formüllü silikon tekerlek serileri kullanılmaktadır. Kauçuk karışımı tekerlek modelleri ve sert yüzeye sahip tekerlek modelleri yüzey tutunması zayıf olduğu için çok tavsiye edilmemektedir. Önünde bulunan çizgi sensörlerinden alınan çizgi verisi mikrodenetleyiciye aktarılarak yazılımda motor güçleri ayarlanarak robotun çizgide düz olarak gitmesi sağlanır. Tercihen 8'li çizgi sensörleri kullanılsa da 16'lı çizgi sensörleri çizgi okumadaki verimi arttıracağı için tavsiyemizdir. Bu robot modelimizde 8'li sensör modeli tercih etmekteyiz.
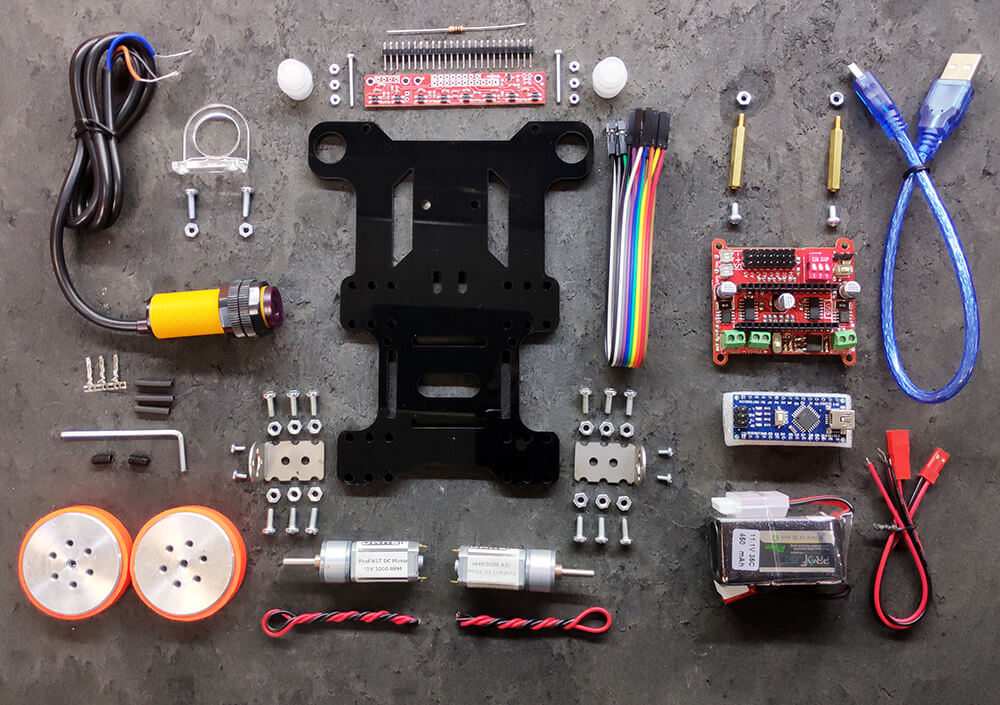
Arduino ile Hızlı Çizgi İzleyen Robot Yapımı için Gerekli Malzemeler Nelerdir?
- 1 adet Arduino Nano
- 1 adet Wing Hızlı Çizgi İzleyen Robot Kartı
- 1 adet Hızlı Çizgi İzleyen Gövdesi
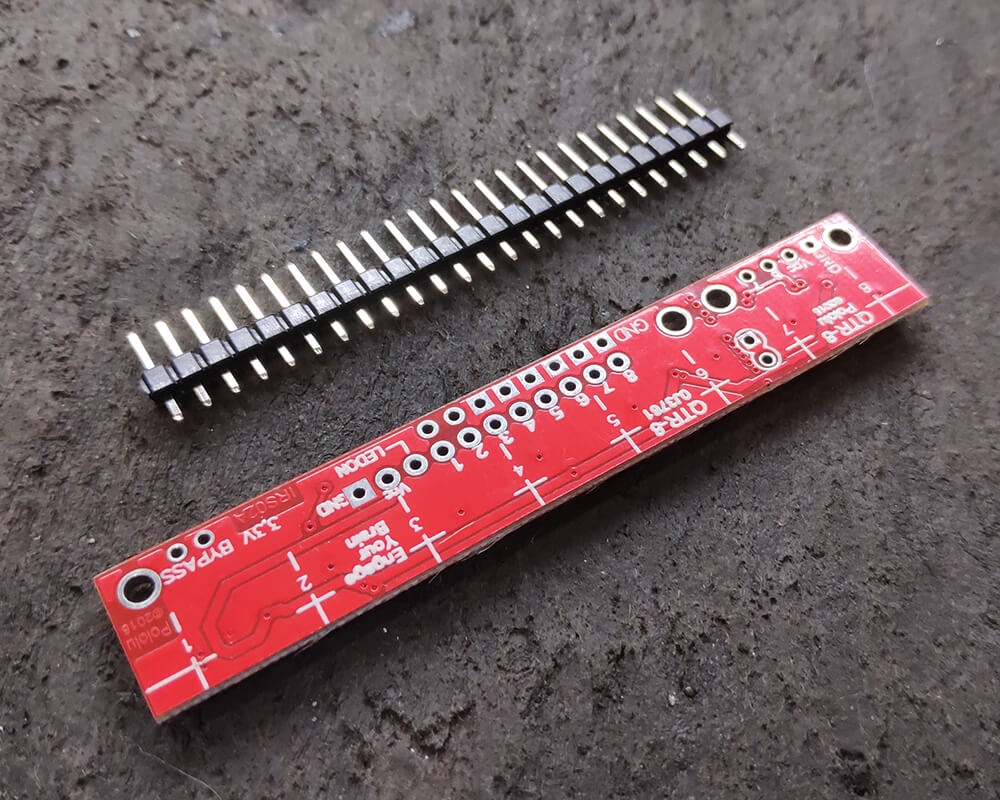
- 1 adet 8'li QTR 8RC Kızılötesi Çizgi Sensörü
- 1 adet MZ80 Kızılötesi Cisim Sensörü
- 1 adet MZ80 Sensör Tutucu
- 1 adet 11.1V 450mAh Lipo Batarya (Hızı arttırmak için 14.8V'luk Lipo Pilde kullanabilirsiniz.)
- 2 adet 12V Redüktörlü DC Motor (Bu Robotta 12V 3000RPM Profast Serisi DC Motor modelini tercih ettik.)
- 2 Adet 42mm çaplı Silikon Tekerlek ( Elektron Silikon Tekerlek Serisi)
- 1 set Dişi Dişi 20cm Jumper Kablo Seti
- 1 set Plastik Mini Sarhoş Tekerlek
- 1 set 16mm Metal Motor Tutucu
- 1 adet Program yüklemek için Arduino Nano Kablosu
Gerekli malzemeleri ve robotun çalışma mantığını anlattığımıza göre robotunmontajınaa geçebiliriz.Hızlı çizgi izleyen robot montajı için , yan keski,mini pense, havya, sıcak silikon ve tornavida gerekmektedir.
Hızlı Çizgi İzleyen Robotunu doğru sıralamayla montajlamak çok önemlidir. Soldan Sağa doğru aşağıdaki montaj aşamalarını takip ediniz.
 |
 |
 |
 |
 |
|
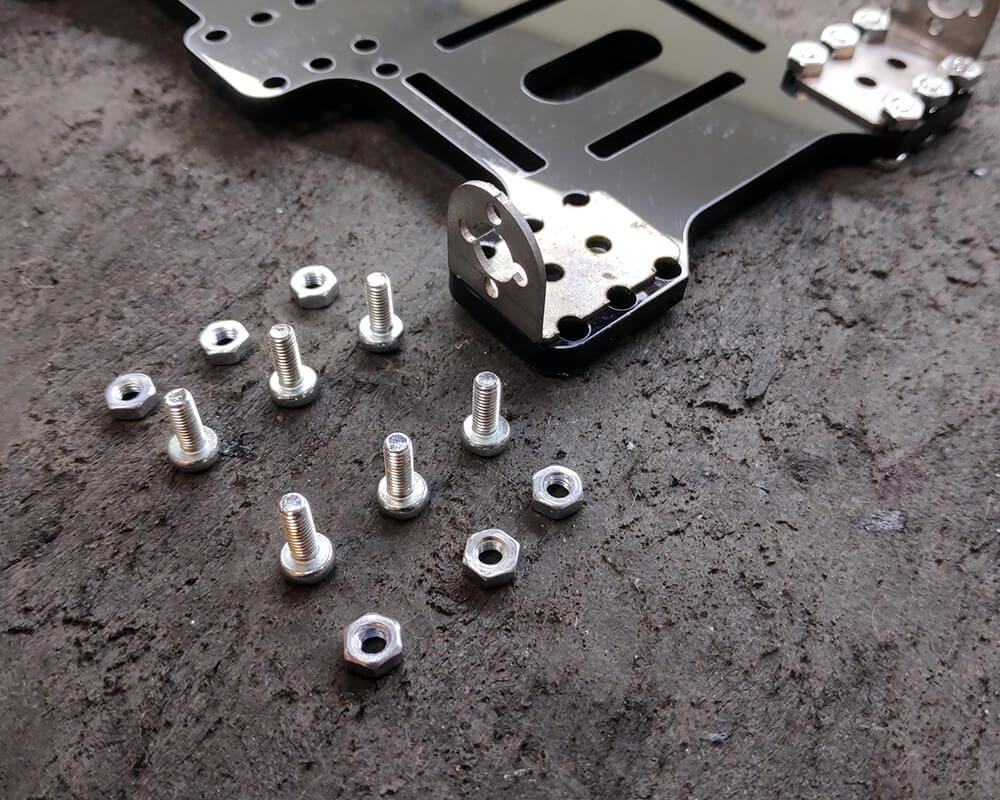
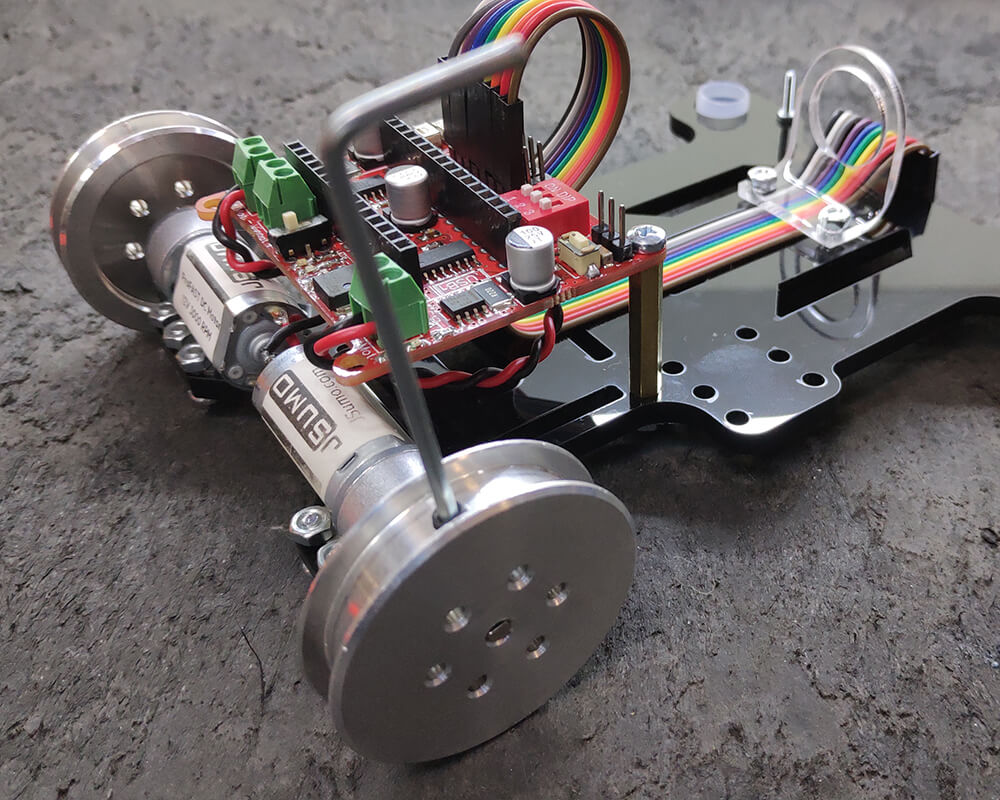
Motor aparatlarını gövde üzerine yerleştirin. |
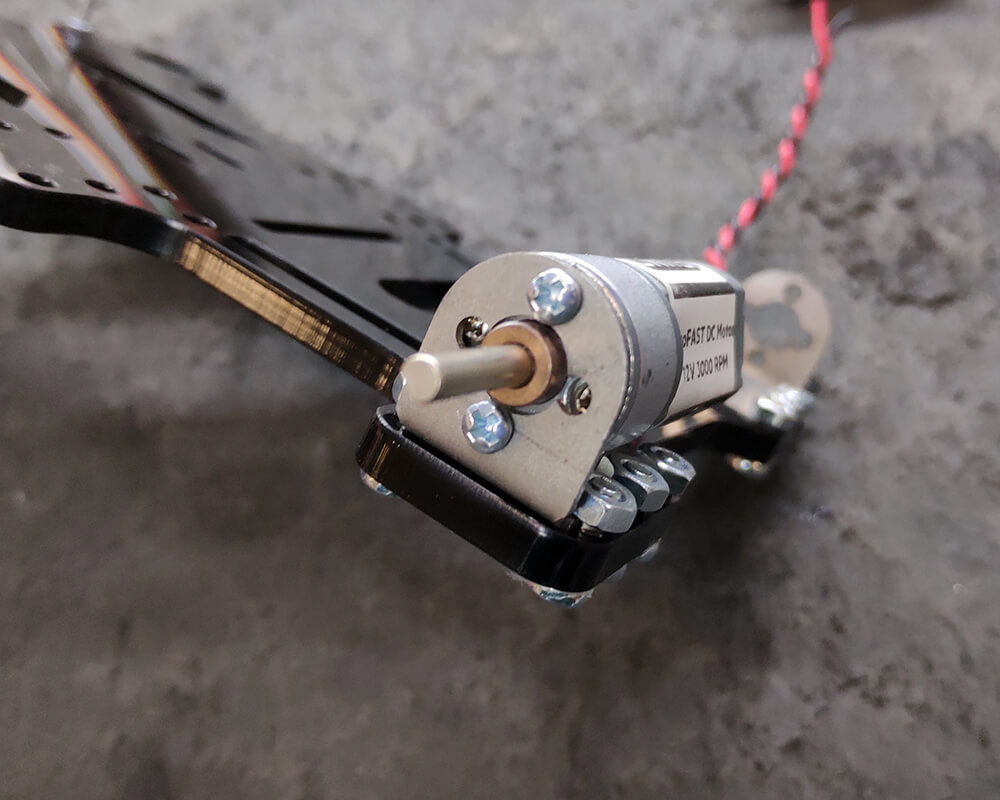
M3 Vida somun yardımıyla gövdeye sabitleyin. | Motor kablolarını motor pabuçlarına lehimleyin. | Motor ile aparatın deliklerini denk getirmelisiniz. | Motorları aparattandan geçirin, M2 vida ile vidalayın. |
 |
 |
 |
 |
 |
|
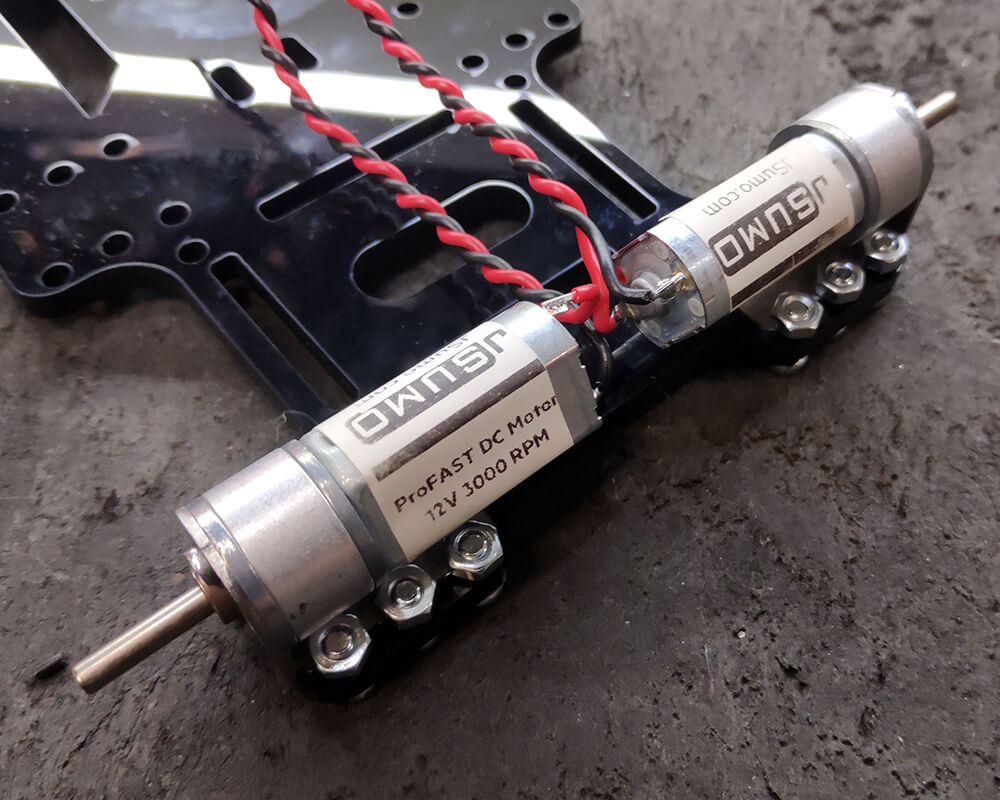
Motorların montaj sonrası görünümü |
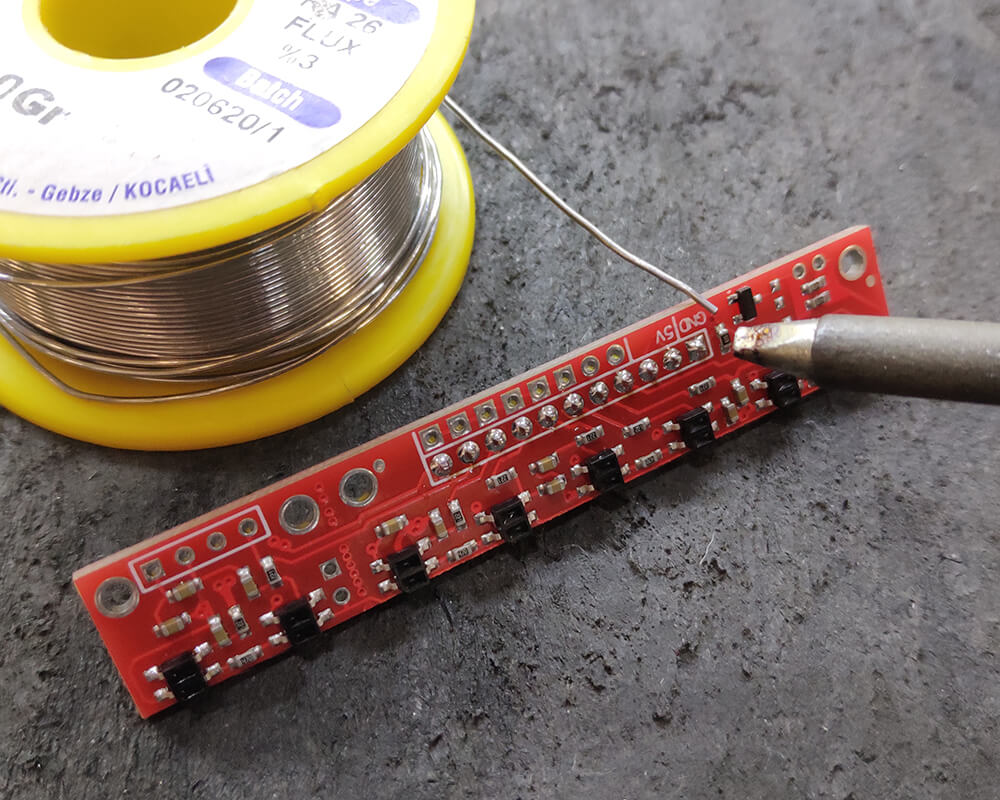
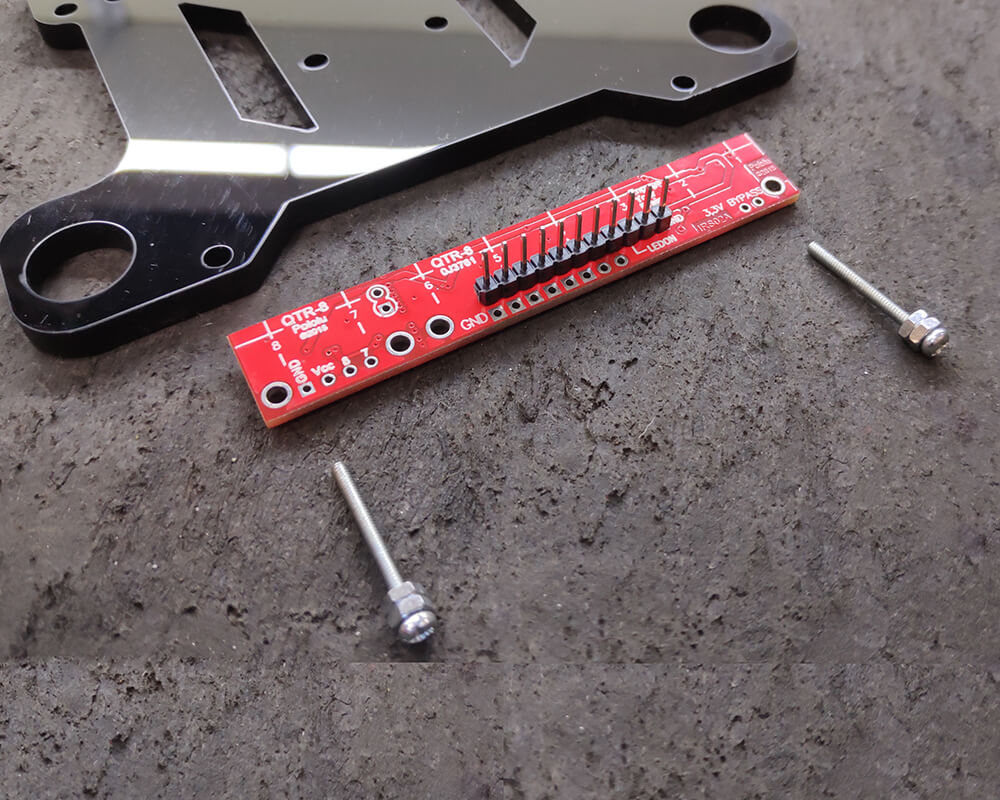
Erkek headerlar çizgi sensör kartının üstüne gelmelidir. | Çizgi sensör kartınının headerlarını lehimleyin. | M2 Vida ve somun ile gövdeye sabitleyin. |
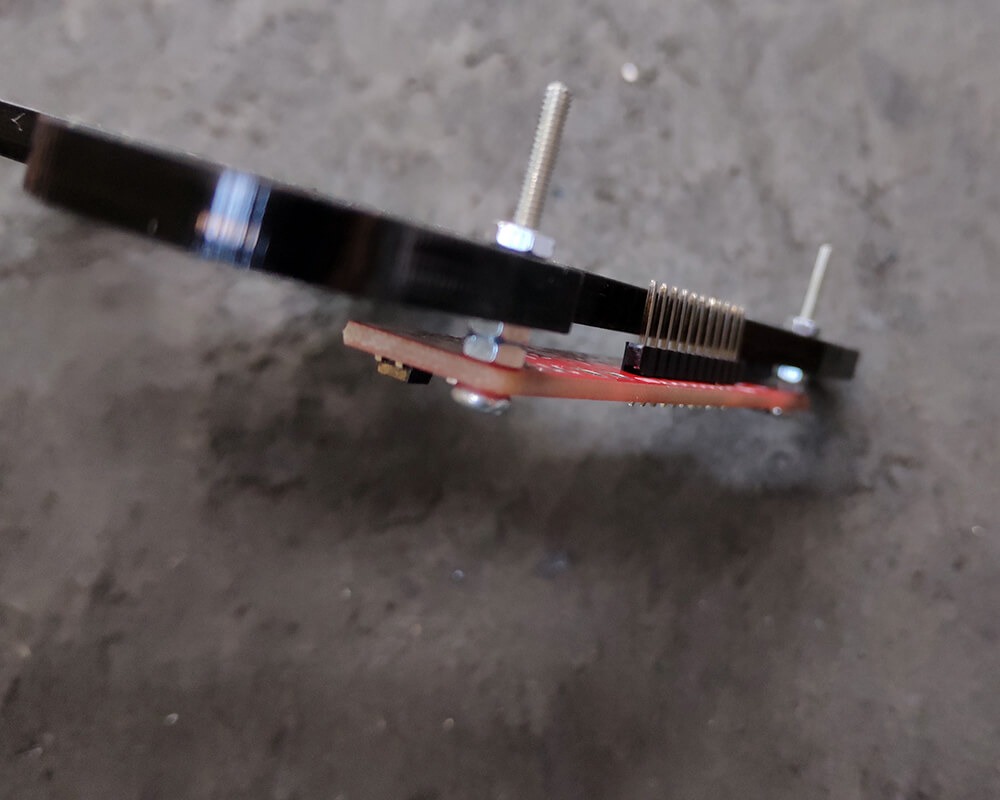
Gövde ile sensör arasında 2 adet m2 somun olmalıdır. |
 |
 |
 |
 |
 |
|
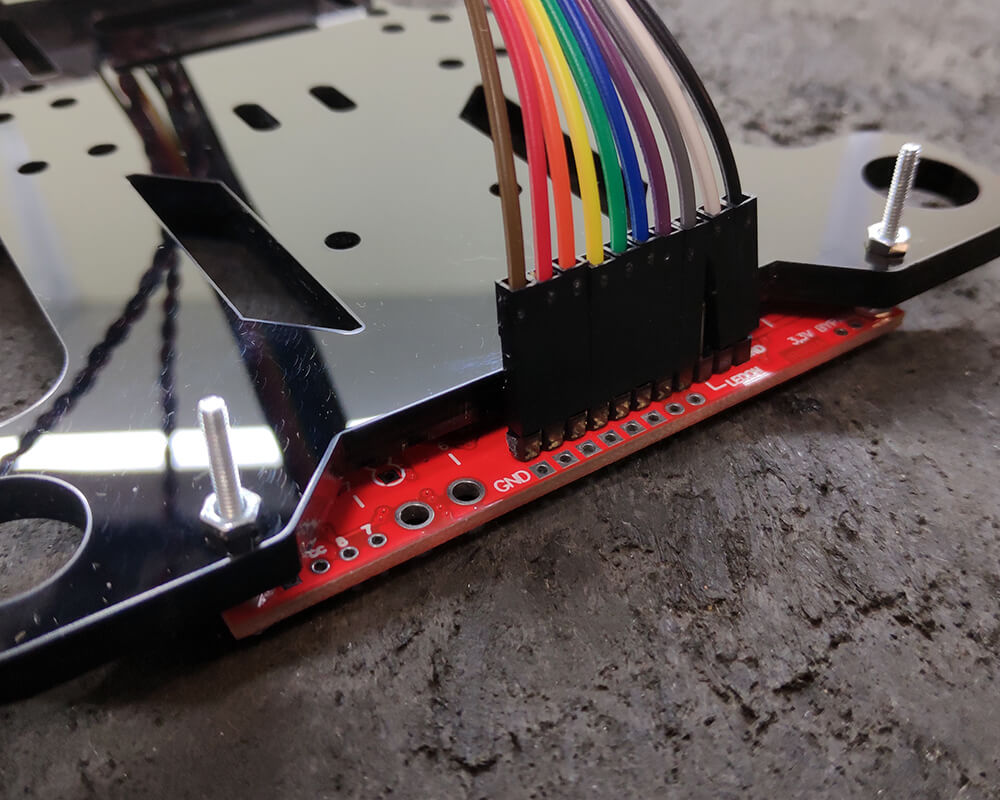
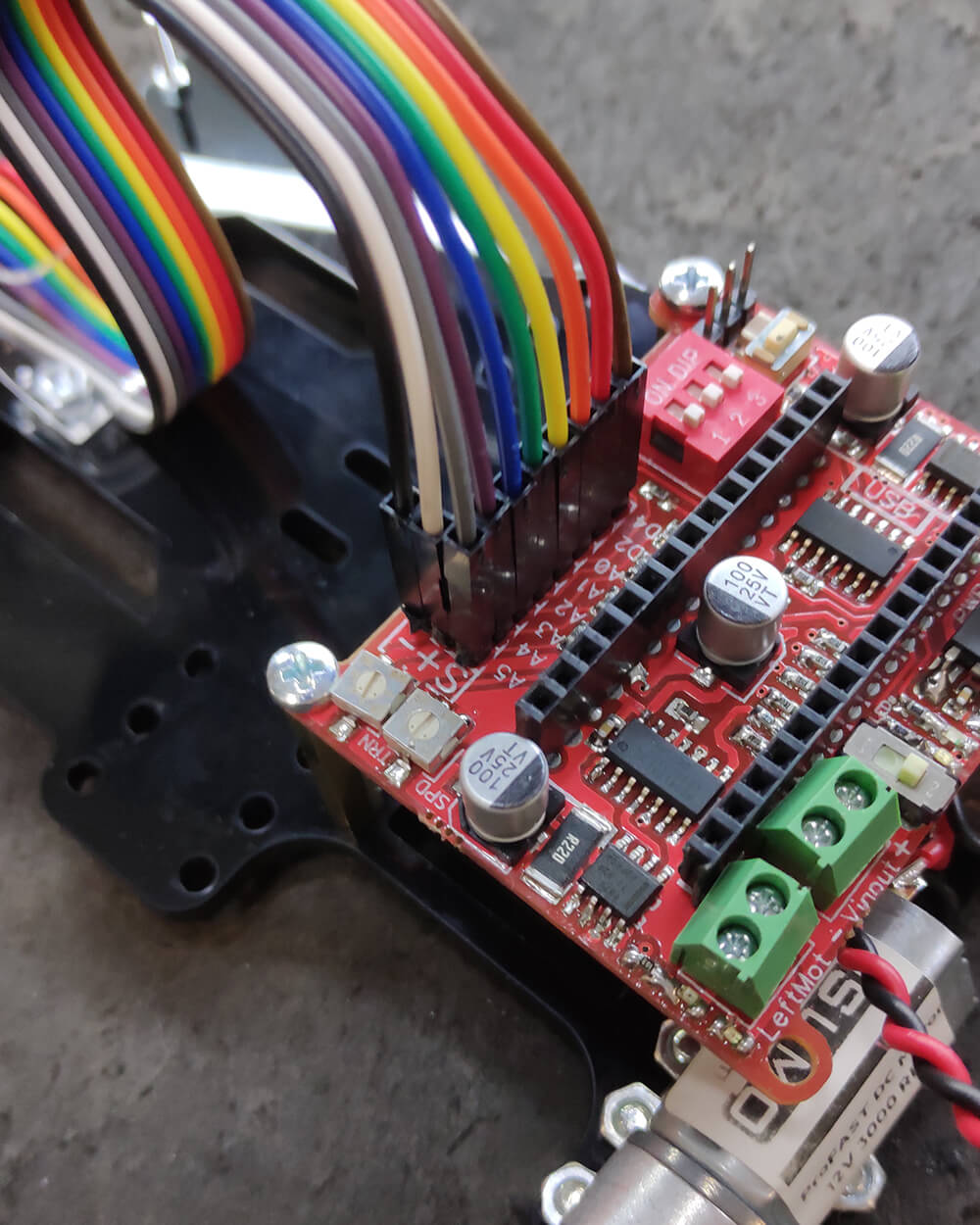
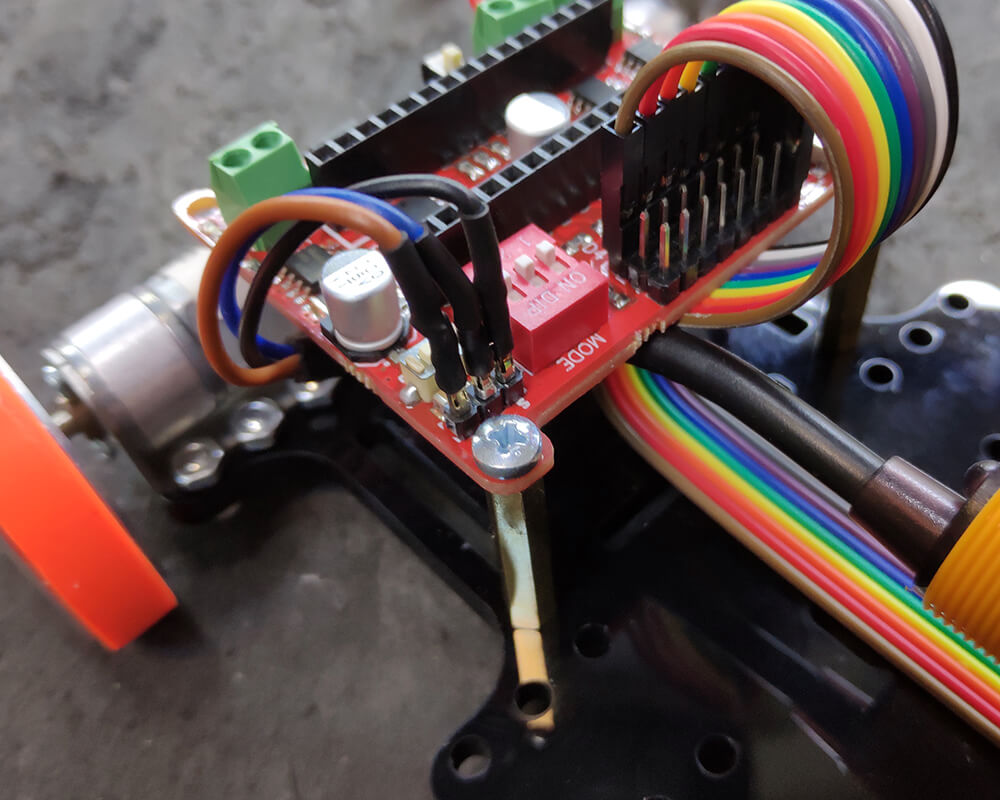
LEDON Pini hariç diğer pinlere jumper kabloları sırasıyla takın. |
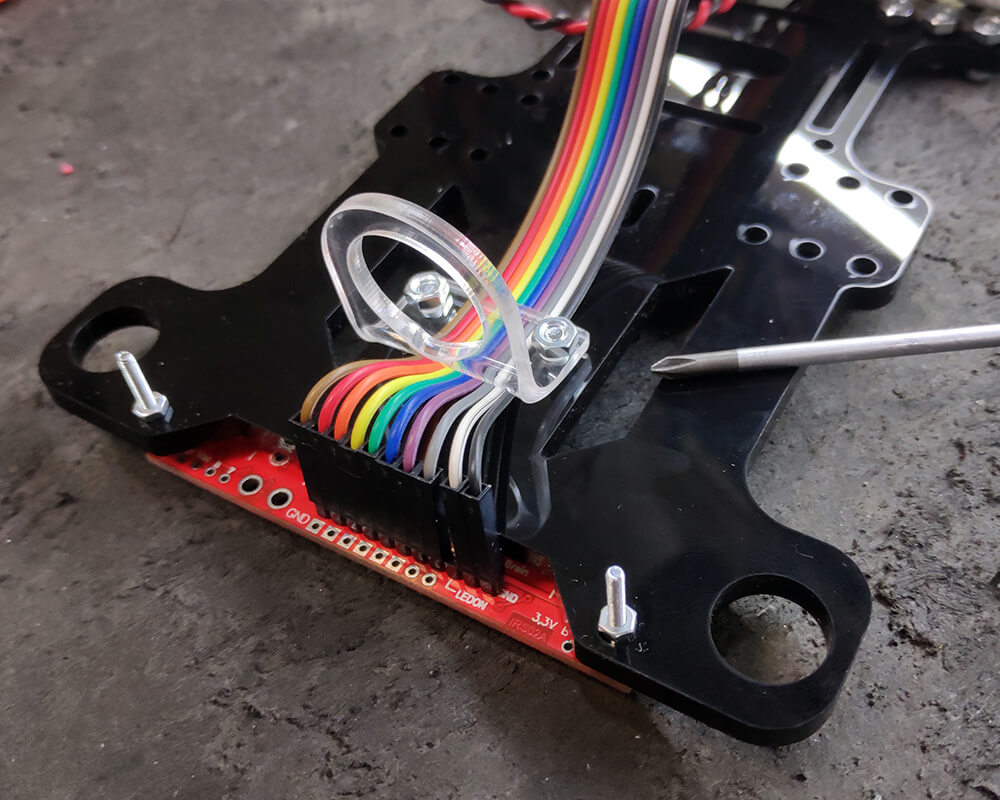
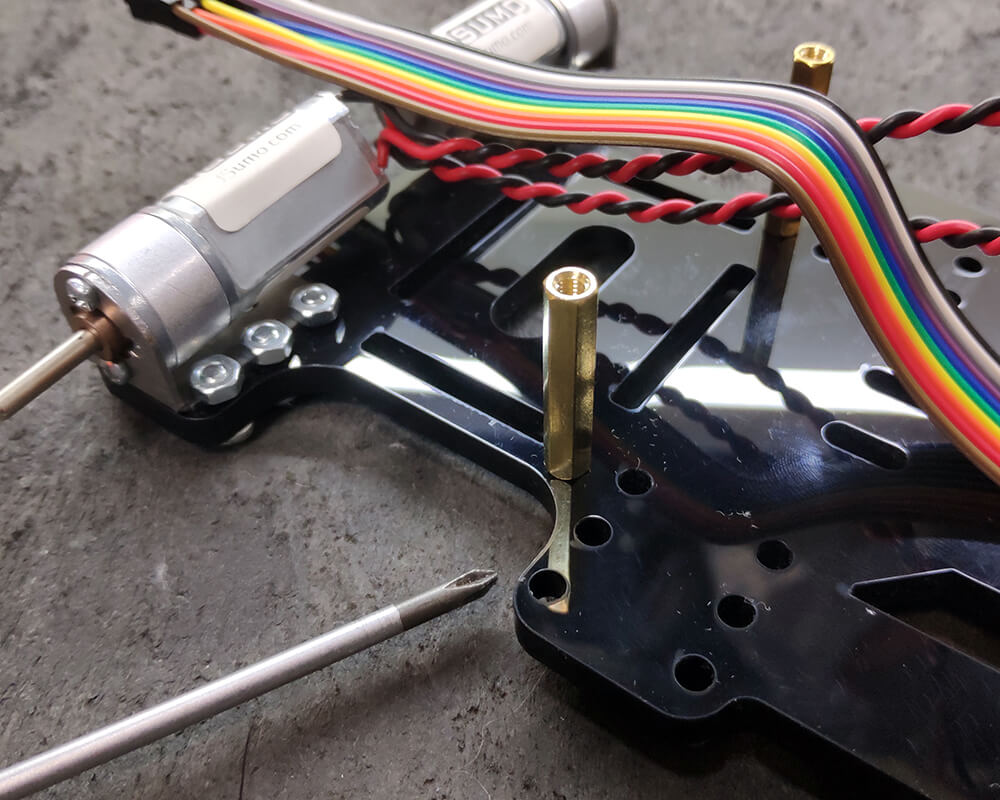
MZ80 Sensör yuvasını gövdenin önüne vidalayın. Jumper kablonun altta kalmasına dikkat edin. | Metal Sarı distansları gövdede resimdeki yere vidalayın. | Wing robot kartını distanslara vidalayın. |
Sensörden gelen Jumper kabloları wing kartına pin sıraları eşleşecek şekilde takın. |
 |
 |
 |
 |
 |
|
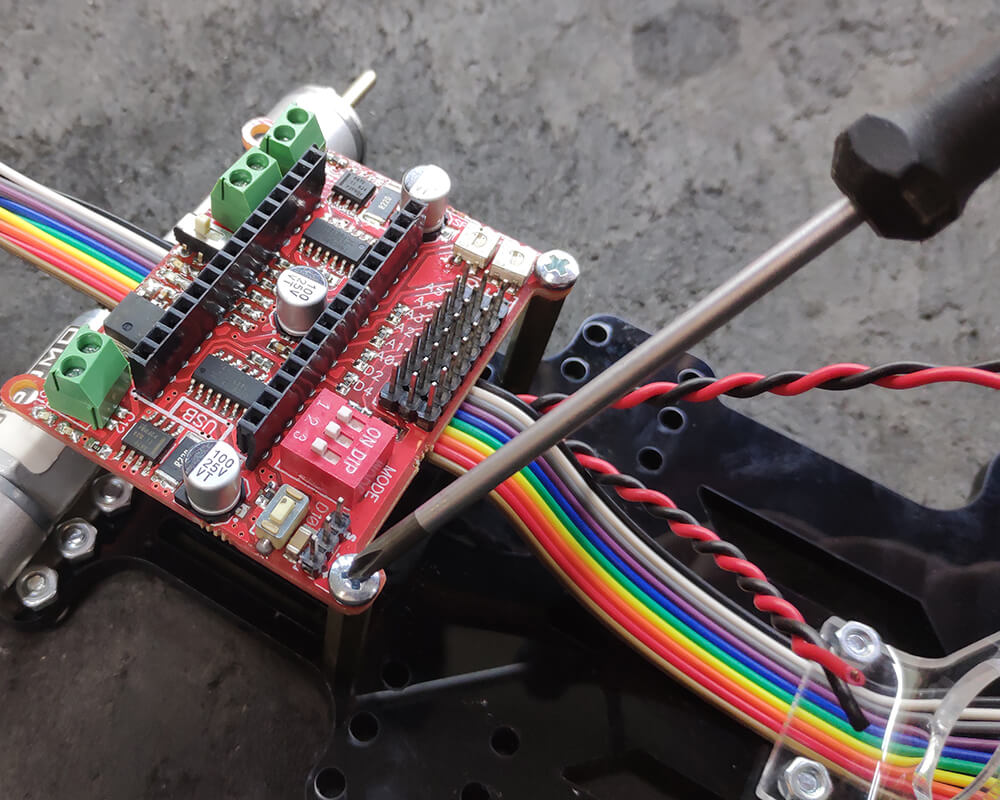
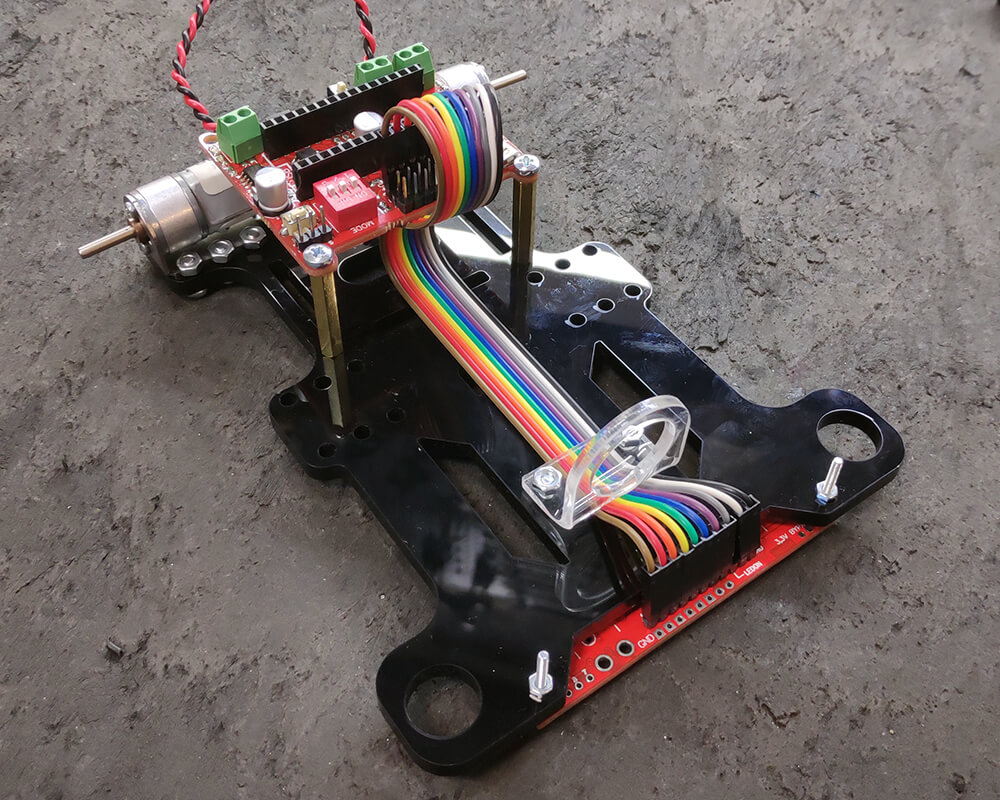
Görünümünüz bu şekilde olmalıdır. |
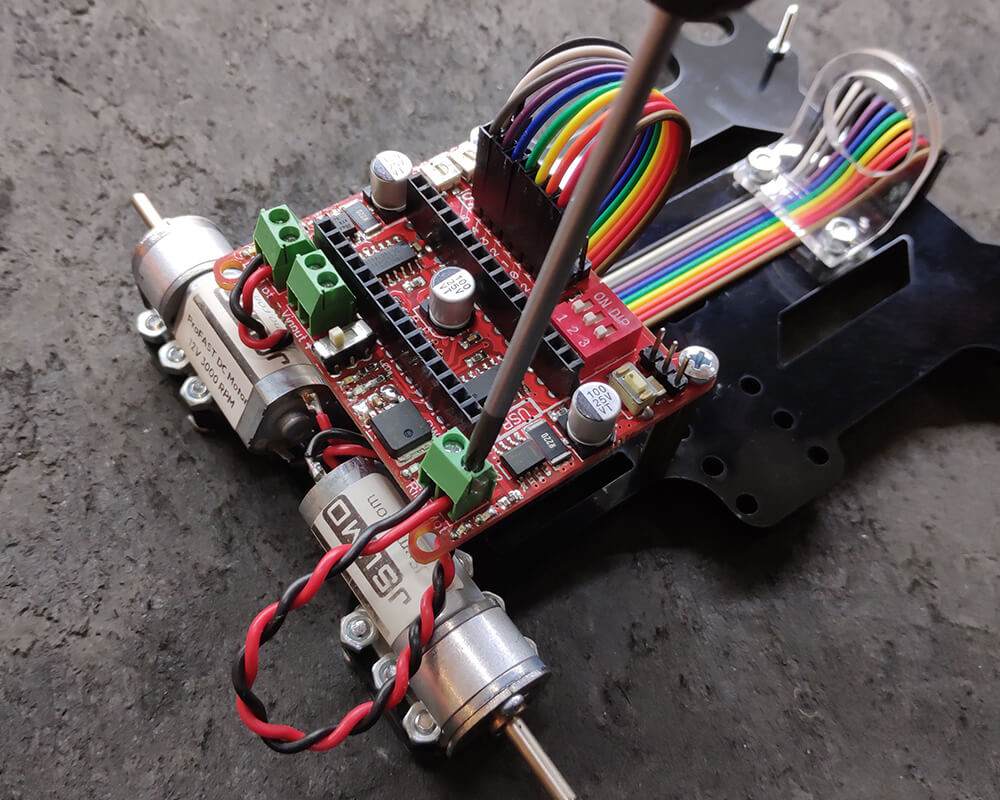
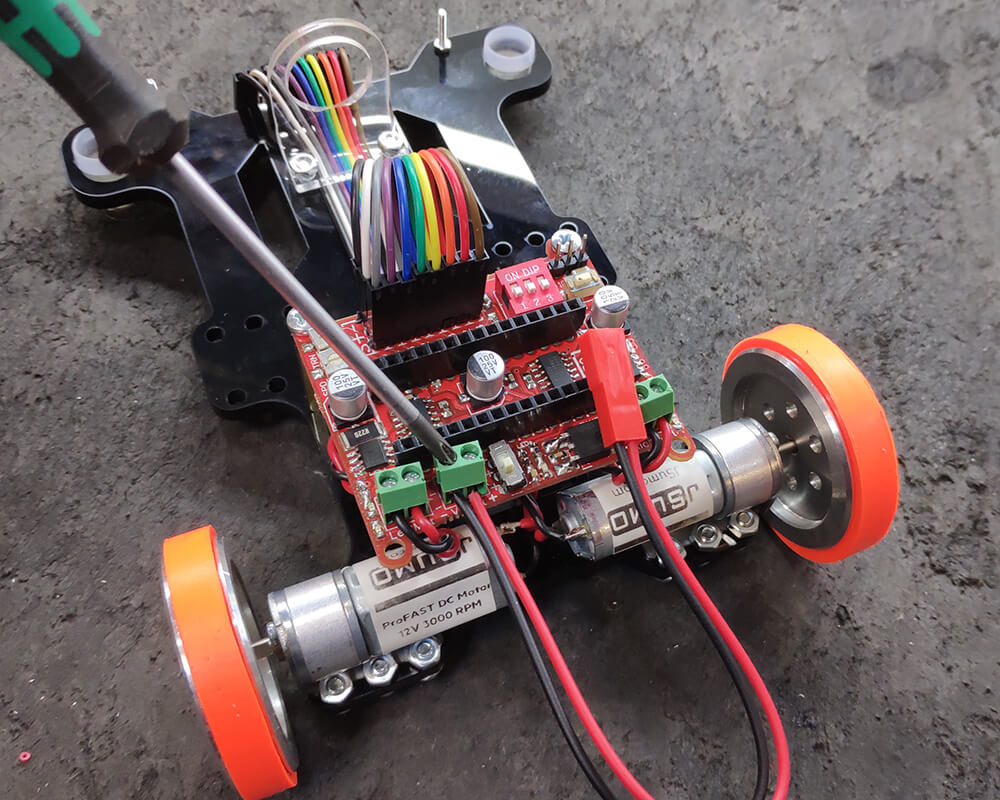
Motor kablolarını motor klemenslerine vidalayın. Robot test aşamasında motorlar olması gerektiğinden ters dönüyorsa bu kabloları(kırmızı ile siyahı) tersleyin. |
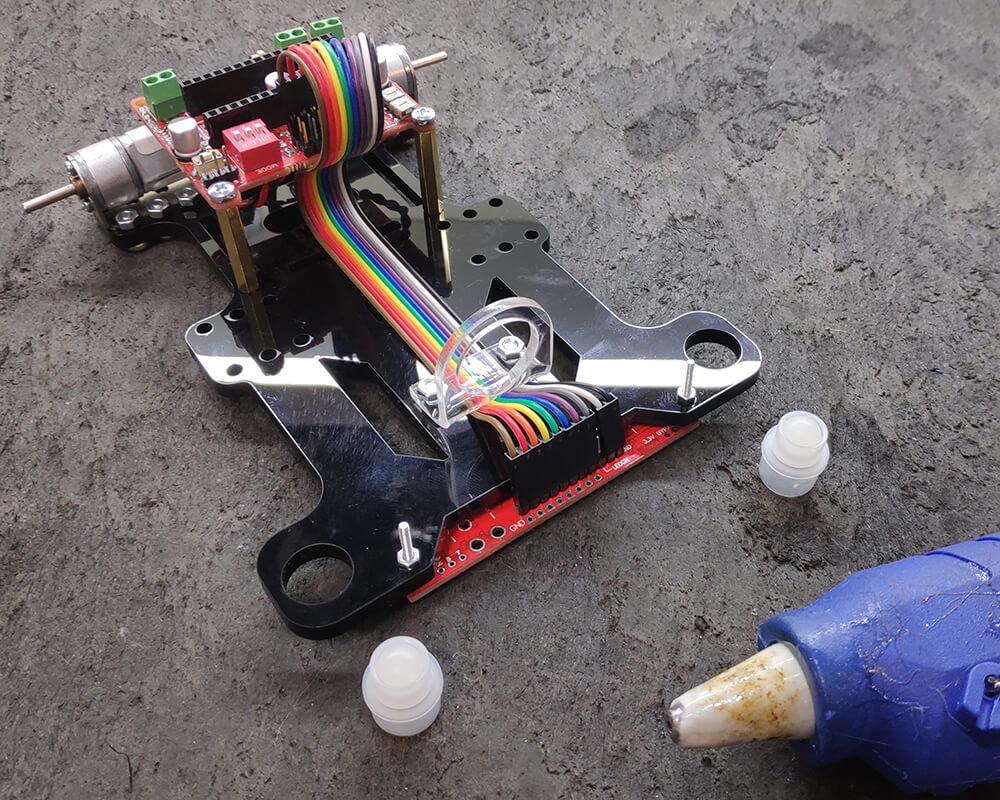
Plastik sarhoş tekerleri gövdenin önündeki deliklere takın. | Gövdenin altından sıcak silikon ile sabitleyin. |
Silikon halkaları jantlardan çıkarıp jantları resimdekigibi motor millerine takın. Ardından setskur ile sıkıştırın. |
 |
 |
 |
 |
 |
|
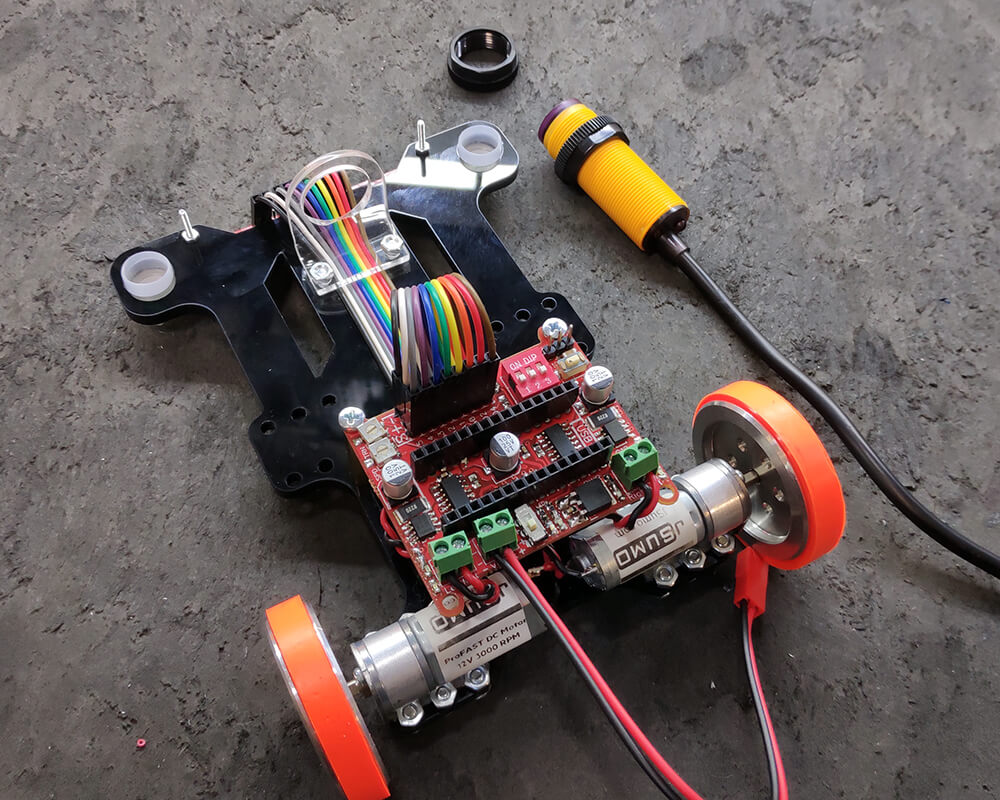
JST Kabloyu güç klemensine vidalayın. Kırmızı (+) Siyah (-) |
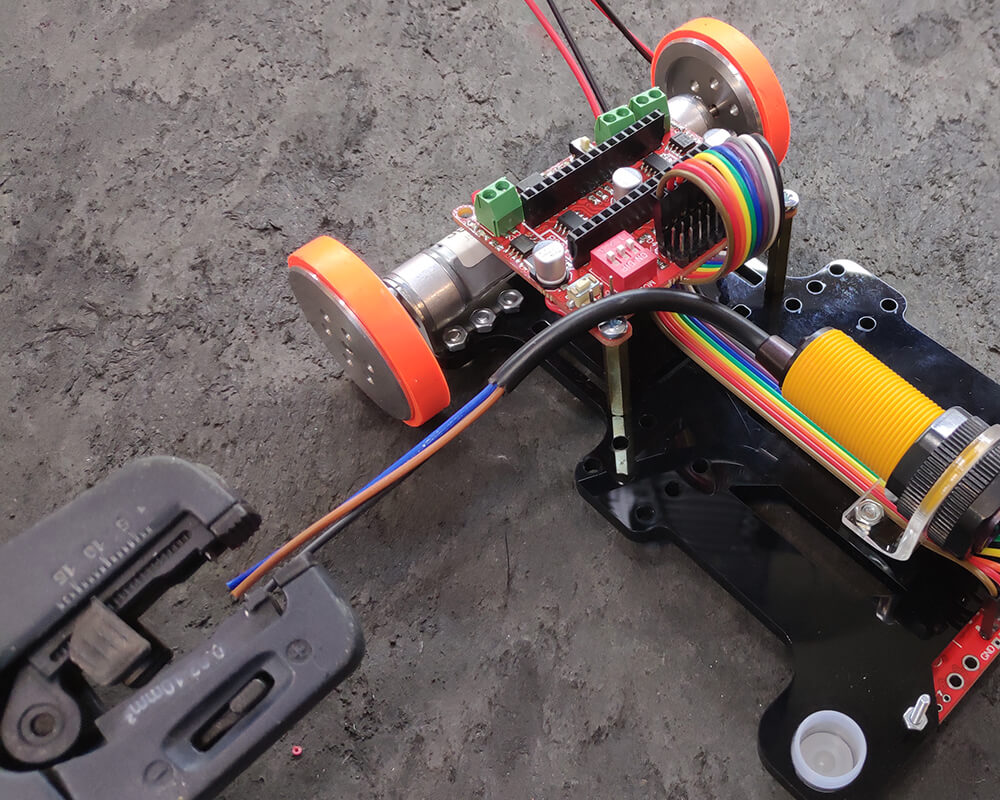
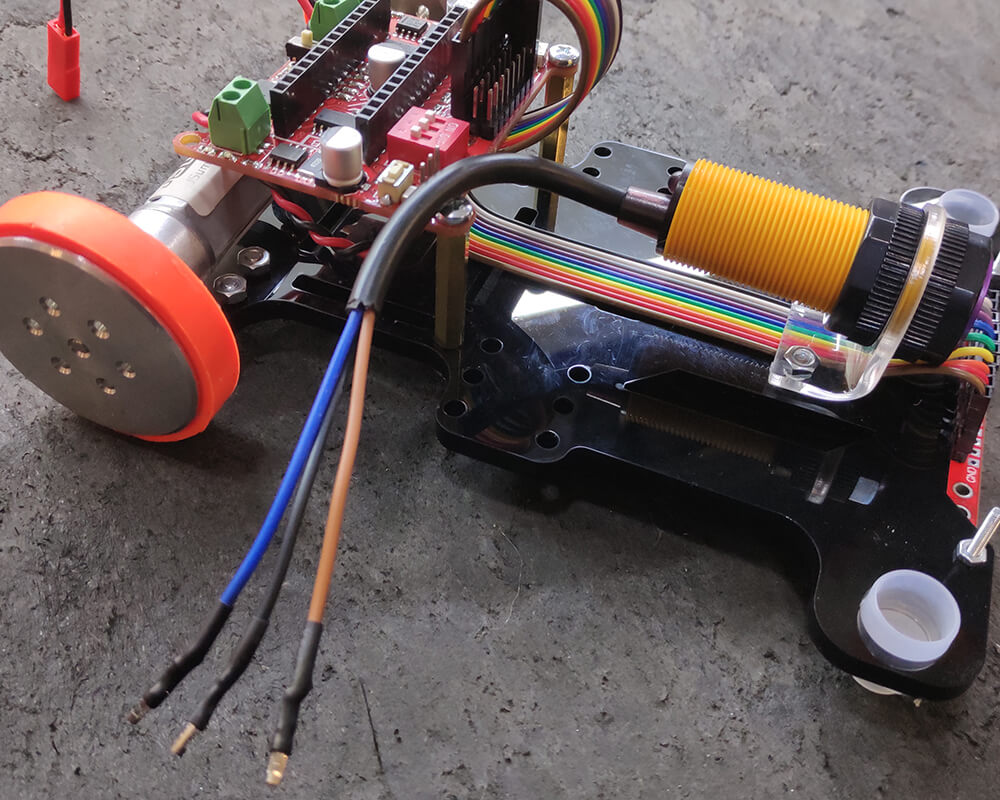
MZ80 Sensörünün montaj kapağını çıkarın. | MZ80 Sensör yuvasına takıp montaj kapağıyla sabitleyin. | MZ80 Sensör kablosunu gerektiği kadar kısaltıp uçlarını açın. |
Uçlarını açtığınız kablolara makaron geçirip, dişi pabuçları takıp sıkıştırın. |
 |
 |
 |
|
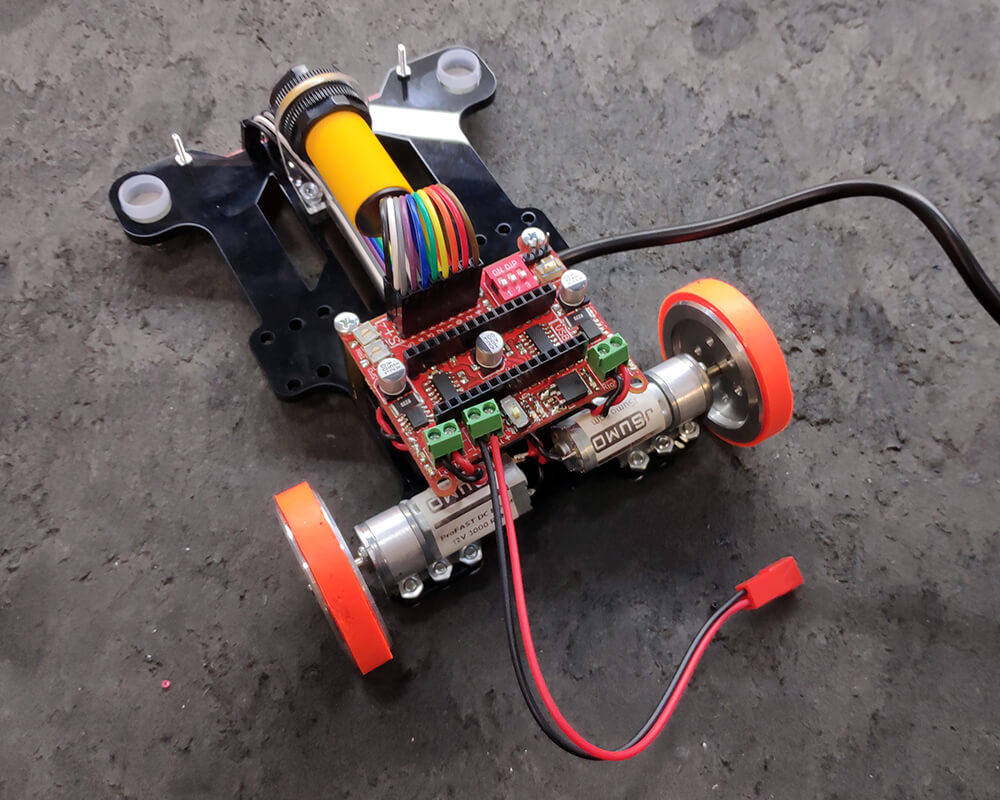
MZ80 Sensör uçlarını wing kartındaki pinlerine takın. Siyah Sinyal, Mavi (-), Kahverengi (+) |
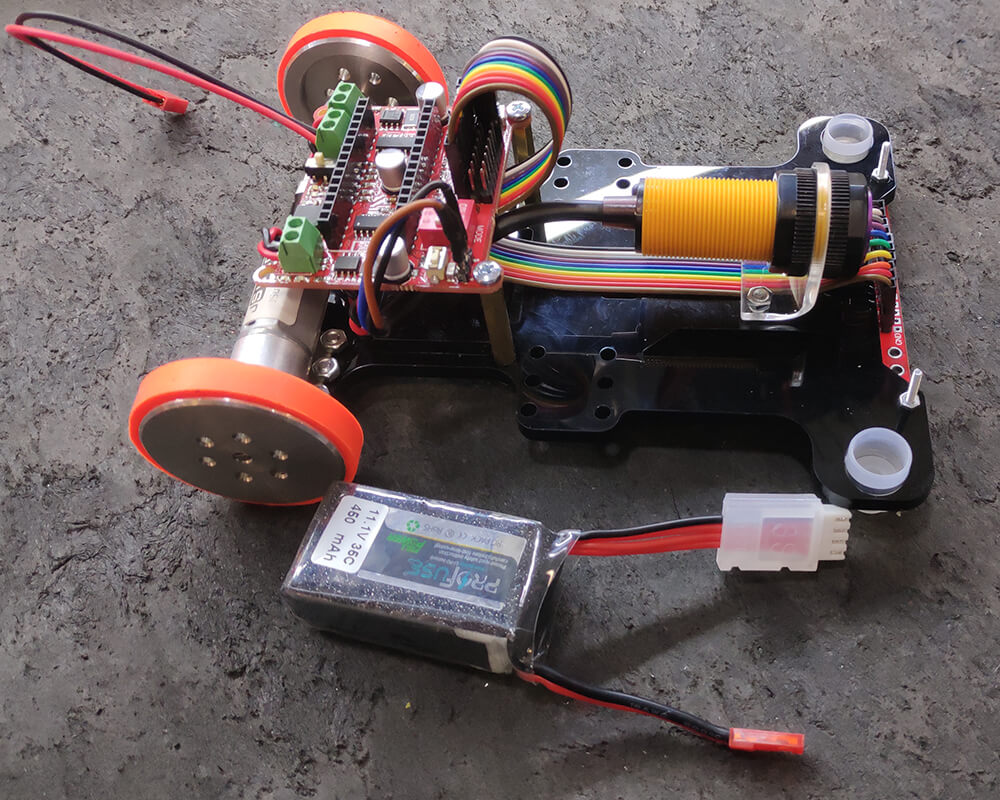
Lipo bataryayı gövde ile kart arasına yerleştirin. | JST Kablo ile pil kablosunu birbine geçirin. |
Hızlı çizgi izleyen robotun montajı bitti. Artık yazılımını yükleyebilirsiniz. Yarışmalarda başarılar dileriz :)